
1. Εισαγωγή στην τεχνολογία κυκλικών πλεκτικών μηχανών
1. Σύντομη εισαγωγή στην κυκλική μηχανή πλεξίματος
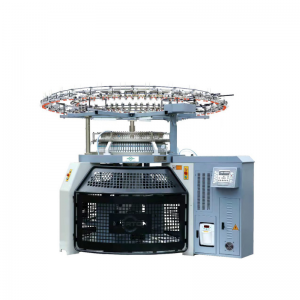
Η κυκλική πλεκτική μηχανή (όπως φαίνεται στο Σχήμα 1) είναι μια συσκευή που υφαίνει βαμβακερό νήμα σε σωληνωτό ύφασμα. Χρησιμοποιείται κυρίως για το πλέξιμο διαφόρων τύπων ανάγλυφων πλεκτών υφασμάτων, υφασμάτων για μπλουζάκια, διαφόρων υφασμάτων με σχέδια και τρύπες κ.λπ. Σύμφωνα με τη δομή, μπορεί να χωριστεί σε κυκλική πλεκτική μηχανή μονού ζέρσεϊ και κυκλική πλεκτική μηχανή διπλού ζέρσεϊ, οι οποίες χρησιμοποιούνται ευρέως στην κλωστοϋφαντουργική βιομηχανία.
 2. Απαιτήσεις διαδικασίας
2. Απαιτήσεις διαδικασίας
(1) Ο μετατροπέας απαιτείται να έχει ισχυρή περιβαλλοντική αντοχή, επειδή η θερμοκρασία του περιβάλλοντος εργασίας στο χώρο είναι σχετικά υψηλή και το βαμβάκι μπορεί εύκολα να προκαλέσει σβήσιμο και ζημιά στον ανεμιστήρα ψύξης, καθώς και φράξιμο των οπών ψύξης.
(2) Απαιτείται ευέλικτη λειτουργία ίντσας. Κουμπιά ίντσας είναι εγκατεστημένα σε πολλά σημεία του εξοπλισμού και ο μετατροπέας απαιτείται να ανταποκρίνεται γρήγορα.
(3) Υπάρχουν τρεις ταχύτητες που απαιτούνται για τον έλεγχο της ταχύτητας. Η μία είναι η ταχύτητα λειτουργίας ίντσας, συνήθως περίπου 6Hz. η άλλη είναι η κανονική ταχύτητα ύφανσης, με την υψηλότερη συχνότητα έως 70Hz. η τρίτη είναι η λειτουργία συλλογής χαμηλής ταχύτητας, η οποία απαιτεί συχνότητα περίπου 20Hz.
(4) Κατά τη λειτουργία της κυκλικής μηχανής πλεξίματος, η αντιστροφή και η περιστροφή του κινητήρα απαγορεύονται απολύτως, διαφορετικά οι βελόνες της βάσης βελόνων θα λυγίσουν ή θα σπάσουν. Εάν η κυκλική μηχανή πλεξίματος χρησιμοποιεί μονοφασικό ρουλεμάν, αυτό δεν θα ληφθεί υπόψη. Εάν το σύστημα περιστρέφεται προς τα εμπρός και προς τα πίσω, εξαρτάται πλήρως από την εμπρόσθια και την οπίσθια περιστροφή του κινητήρα. Αφενός, πρέπει να είναι σε θέση να απαγορεύσει την οπίσθια περιστροφή και, αφετέρου, πρέπει να ρυθμίσει το φρένο DC για την εξάλειψη της περιστροφής.
3. Απαιτήσεις απόδοσης
Κατά την ύφανση, το φορτίο είναι βαρύ και η διαδικασία ίντσας/εκκίνησης πρέπει να είναι γρήγορη, γεγονός που απαιτεί ο μετατροπέας να έχει χαμηλή συχνότητα, μεγάλη ροπή και γρήγορη ταχύτητα απόκρισης. Ο μετατροπέας συχνότητας υιοθετεί λειτουργία διανυσματικού ελέγχου για να βελτιώσει την ακρίβεια σταθεροποίησης ταχύτητας του κινητήρα και την έξοδο ροπής χαμηλής συχνότητας.
4. Καλωδίωση ελέγχου
Το τμήμα ελέγχου της κυκλικής πλεκτικής μηχανής χρησιμοποιεί μικροελεγκτή ή PLC + έλεγχο διεπαφής ανθρώπου-μηχανής. Ο μετατροπέας συχνότητας ελέγχεται από ακροδέκτες για εκκίνηση και διακοπή και η συχνότητα δίνεται από αναλογική ποσότητα ή ρύθμιση συχνότητας πολλαπλών σταδίων.
Υπάρχουν βασικά δύο σχήματα ελέγχου για τον έλεγχο πολλαπλών ταχυτήτων. Το ένα είναι η χρήση αναλογικού σήματος για τη ρύθμιση της συχνότητας. Είτε πρόκειται για λειτουργία joging είτε για λειτουργία υψηλής και χαμηλής ταχύτητας, το αναλογικό σήμα και οι οδηγίες λειτουργίας δίνονται από το σύστημα ελέγχου. Το άλλο είναι η χρήση μετατροπέα συχνότητας. Η ενσωματωμένη ρύθμιση συχνότητας πολλαπλών σταδίων, το σύστημα ελέγχου δίνει σήμα μεταγωγής συχνότητας πολλαπλών σταδίων, η jog παρέχεται από τον ίδιο τον μετατροπέα και η συχνότητα ύφανσης υψηλής ταχύτητας δίνεται από αναλογική ποσότητα ή ψηφιακή ρύθμιση του μετατροπέα.
2. Απαιτήσεις επί τόπου και σχέδιο θέσης σε λειτουργία
(1) Απαιτήσεις επί τόπου
Η βιομηχανία κυκλικών πλεκτικών μηχανών έχει σχετικά απλές απαιτήσεις για τη λειτουργία ελέγχου του μετατροπέα. Γενικά, συνδέεται με ακροδέκτες για τον έλεγχο της έναρξης και της διακοπής, δίνεται αναλογική συχνότητα ή χρησιμοποιείται πολλαπλή ταχύτητα για τη ρύθμιση της συχνότητας. Η λειτουργία σε ίντσες ή χαμηλή ταχύτητα απαιτείται για γρήγορη λειτουργία, επομένως ο μετατροπέας απαιτείται για τον έλεγχο του κινητήρα για την παραγωγή μεγάλης ροπής χαμηλής συχνότητας σε χαμηλή συχνότητα. Γενικά, στην εφαρμογή κυκλικών πλεκτικών μηχανών, η λειτουργία V/F του μετατροπέα συχνότητας είναι επαρκής.
(2) Σχέδιο εντοπισμού σφαλμάτων Το σχήμα που υιοθετούμε είναι: Μετατροπέας διανύσματος ρεύματος χωρίς αισθητήρα σειράς C320 Ισχύς: 3,7 και 5,5KW
3. Παράμετροι και οδηγίες εντοπισμού σφαλμάτων
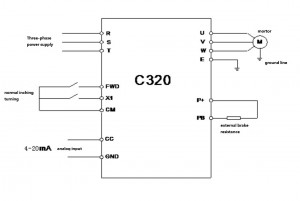
1. Διάγραμμα καλωδίωσης
2. Ρύθμιση παραμέτρων εντοπισμού σφαλμάτων
(1) F0.0=0 Λειτουργία VF
(2) F0.1=6 συχνότητα εισόδου καναλιού εξωτερικού ρεύματος σήμα
(3) F0.4=0001 Έλεγχος εξωτερικού τερματικού
(4) Η αποτροπή αντίστροφης περιστροφής F0.6=0010 είναι έγκυρη
(5) F0,10=5 χρόνος επιτάχυνσης 5S
(6) F0,11=0,8 χρόνος επιβράδυνσης 0,8S
(7) F0.16=6 συχνότητα φορέα 6K
(8) F1.1=4 Ενίσχυση ροπής 4
(9) F3.0=6 Ορίστε το X1 σε κίνηση προς τα εμπρός
(10) F4.10=6 ορίστε τη συχνότητα βηματισμού στα 6HZ
(11) F4.21=3.5 Ορίστε τον χρόνο επιτάχυνσης jog σε 3.5S
(12) Το F4.22=1.5 ορίζει τον χρόνο επιβράδυνσης jog σε 1.5S
Σημειώσεις εντοπισμού σφαλμάτων
(1) Αρχικά, κάντε μια ελαφριά κίνηση για να προσδιορίσετε την κατεύθυνση του κινητήρα.
(2) Όσον αφορά τα προβλήματα κραδασμών και αργής απόκρισης κατά το τζόκινγκ, ο χρόνος επιτάχυνσης και επιβράδυνσης του τζόκινγκ πρέπει να προσαρμόζεται ανάλογα με τις απαιτήσεις.
(3) Η ροπή χαμηλής συχνότητας μπορεί να βελτιωθεί ρυθμίζοντας το φέρον κύμα και την ενίσχυση ροπής.
(4) Το βαμβάκι φράζει τον αεραγωγό και ο ανεμιστήρας σταματάει, προκαλώντας κακή απαγωγή θερμότητας από τον μετατροπέα. Αυτή η κατάσταση συμβαίνει συχνά. Προς το παρόν, ο γενικός μετατροπέας παραλείπει τον θερμικό συναγερμό και στη συνέχεια αφαιρεί χειροκίνητα τα χνούδια στον αεραγωγό πριν συνεχίσει να τον χρησιμοποιεί.
Ώρα δημοσίευσης: 08 Σεπτεμβρίου 2023